








ジャイロスコープ(角速度センサ)は回転の速度(角速度)を測定するために使われます。
回転軸が固定されているものであれば、タコメータやポテンショメータをその回転軸に設置することによって角度、もしくは角速度を得ることができますが、空間内を移動する物体(飛行機、船、車など)では、回転軸を持たず、自由に動きますので、タコメータ、ポテンショメータは使えません。
このようなアプリケーションにおいて角度もしくは角速度が知りたいときにジャイロスコープが用いられます。
シリコンセンシングのジャイロスコープは、MEMS技術を用いて作製したシリコンのリング型共振子を共振振動させ、そこに発生するコリオリの力から角速度を得るという他に類を見ない構造を持つジャイロスコープになります(詳細メカニズムは下記)。
シリコンセンシングは1998年にMEMS式ジャイロスコープの開発に成功して以降、すでに2000万個を超える製品を世に送り出し、現在も使い続けられています。
現在、シリコンセンシングは、
(1)PZT技術を用いて、表面実装が可能なように小型化されたMEMSジャイロシリーズ
(2)MEMSで最高峰の性能を誇る電磁誘導技術を用いた高精度MEMSジャイロシリーズ
の2系統のMEMSジャイロスコープを製品化しています。

シリコンセンシングのジャイロスコープのメカニズム(電磁誘導型)
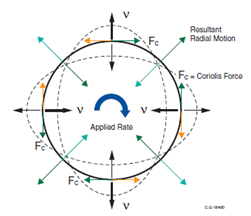
図1
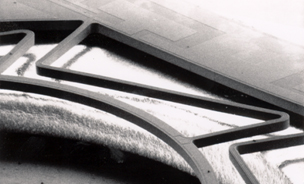
図2
シリコンセンシングが生産しているジャイロスコープは、MEMS-DRIE(深掘イオンエッチング)技術を用いて作成されるシリコンのリングがコア技術になります。
このシリコンのリングは、Leg(図2)と呼ばれる支柱によって空間に浮く形で固定され、ローレンツ力によりリングを楕円形に変形させる共振振動(図1)を起こします。
シリコンリング上には駆動電極と検出電極が形成されており、駆動電極に電流を流すことで変位を発生させ、変位が発生することで生まれる起電力を用いてループを形成し、常に同じ周波数、同じ振幅で駆動され続けます。
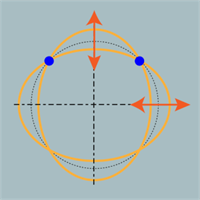
図3
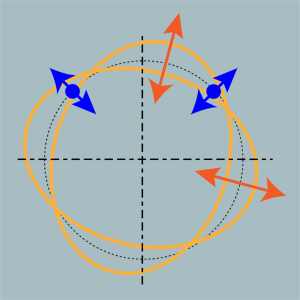
図4
図3は、角速度の入力が無い状態での共振振動をしているリングの模式図になります。
リングは、「横に延ばされる←→縦に延ばされる」の楕円変形を繰り返しますが、青い点は動きません。
図4はその状態で角速度が加わったときで、振動する各点に対してコリオリの力が働くので、振動が湾曲するような動きに変わります。
これによって青い点も動きますので、この動きを検出することで、角速度を求めることができることになります。
一般的なMEMS式のジャイロセンサでは、MEMSという特徴を生かした小型・安価な製造が可能ですが、半面、固定支点が振動等の影響を受けるとMEMSの共振振動が外部の振動によって乱され、誤った角速度出力をする場合があります。
ところがリング形状の場合、リングの振動が外部の振動によって乱されることが非常に少なく、振動、衝撃に非常に強いセンサが実現できます。
また、前述のLeg形状の工夫により、温度特性に優れた性能をも獲得しています。
このアニメーションは車の動きに合わせたリングの説明図になります。
車が直進しているときは、リングは前述の図3の振動を繰り返し、緑とオレンジの点は動きません。
車が、カーブに来ると図4のように振動が湾曲し、緑とオレンジが動きだします。
その量は、車が受けている角速度に比例していますので、信号処理することで角速度センサとして成立します。